
Using a cobot, the objective of the project is to collect cables crimped by Komax 630.
Progect states:
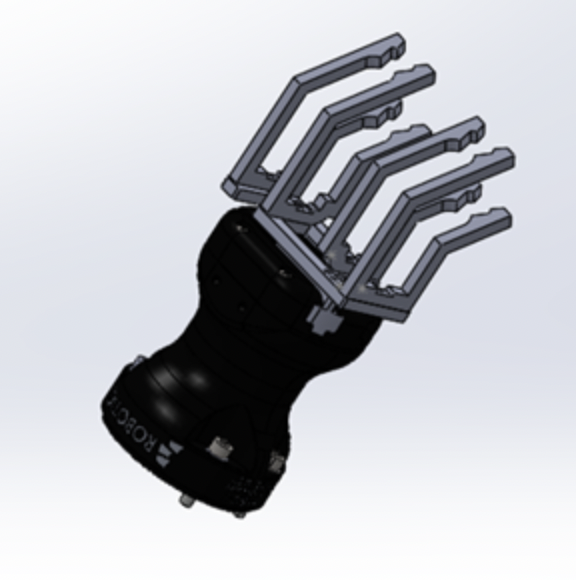
- Design the fingers’ gripper to collect cables
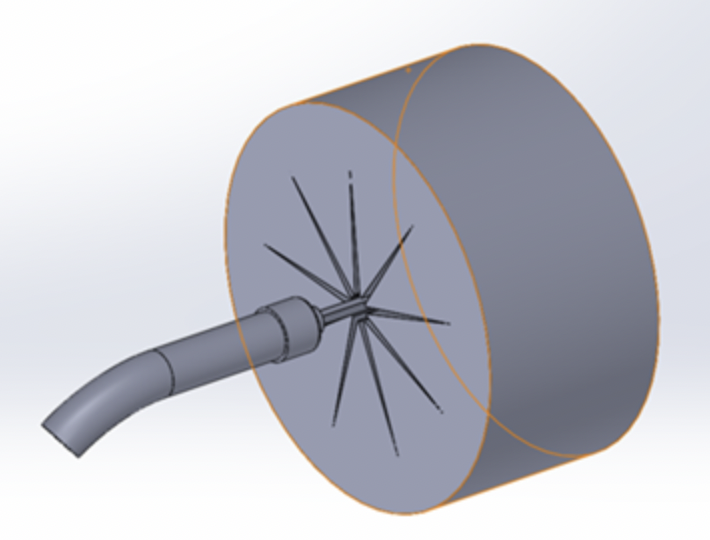
- Design the cable clips to hold the cables inside a warehouse
- A ROS simulation was used to evaluate the feasibility of the project
Tests on field will start soon…
Written by IEMA