
Blog

CORDIS has published an article on the results of our REMODEL project
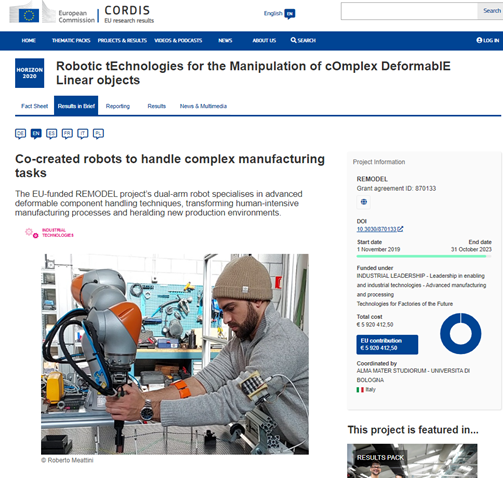
CORDIS (the European Commission’s primary service for EU-funded research results) has published an article about the results of our project. The article has been included on Results Pack on Human-centric…
REMODEL Team at the AIM Conference 2023 in Seattle, WA

Alex Pasquali, Alessio Caporali and Bare Luka Žagar their presented their research conducted within the REMODEL project at the Advanced Intelligent Mechatronics (AIM) conference in Seattle, WA. The titles of…
UNIBO and TECNALIA workshop

UNIBO and TECNALIA successfully performed joint experiments testing a novel framework of kinesthetic teaching enhanced with biological signals measured from the operators (electromyographic signals, sEMG) for improving intuitive teaching of…
ROBOSECT at WeMakeFuture 2023 Innovation Event (Rimini, Italy)
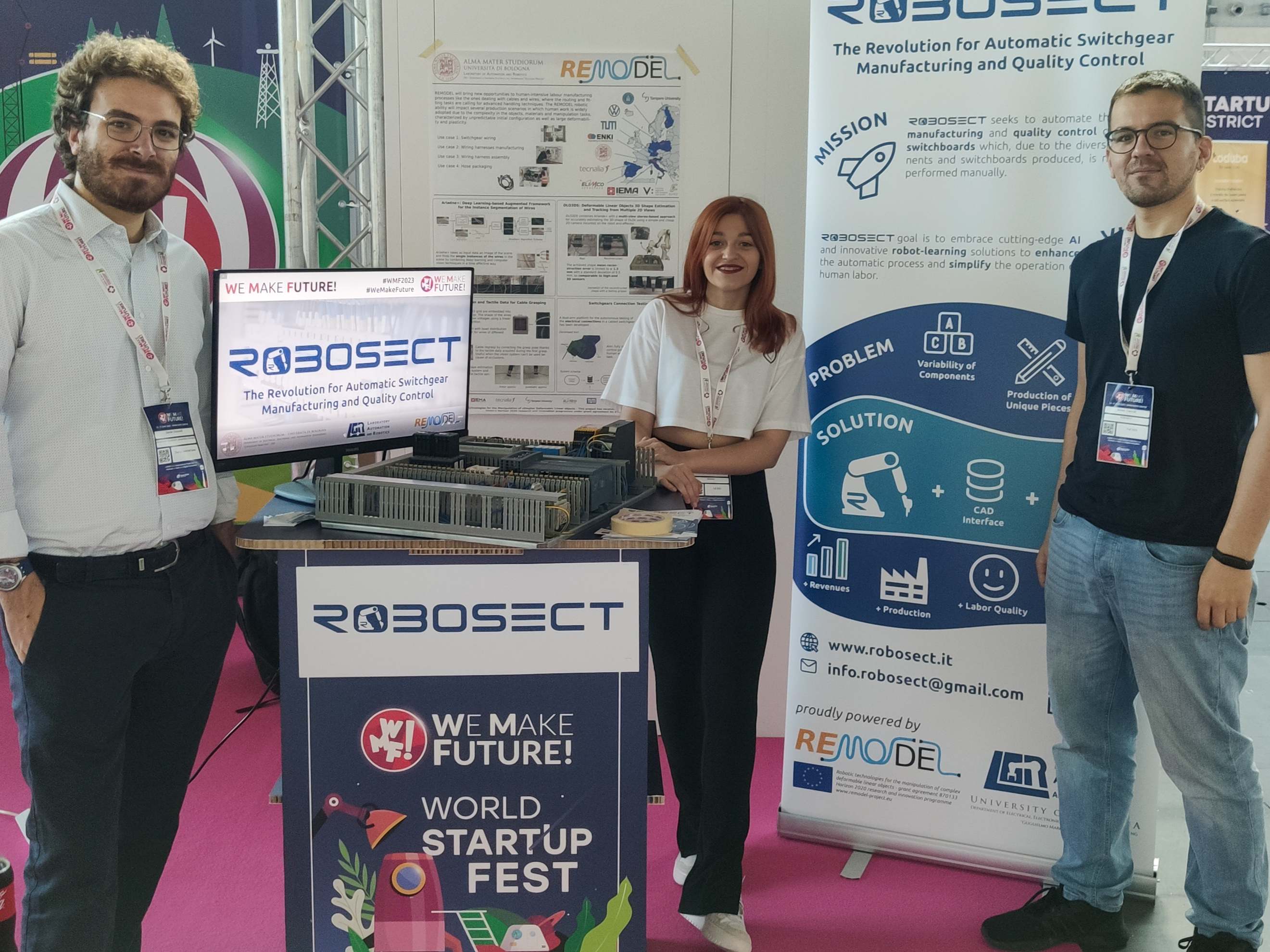
ROBOSECT, the spin-off project of the University of Bologna exploiting the research outcome of UC1, participated at the WeMakeFuture festival in Rimini last week. The event allowed the dissemination of…
Second integration week of the ELVEZ UC
From the 3rd to the 5th of April 2023, TAU, UNIBO, and UCLV collaborated during the second integration week of the ELVEZ use case hosted at UNIBO. Throughout this week,…
REMODEL’s 8th GA

The last 18th and 19th of May, all the REMODEL partners participated in the 8th General Assembly of REMODEL. This two-day meeting was held at Poznan University’s facilities and we…
The implementation of the ELIMCO use case continues to advance.

In April, Tecnalia and ELIMCO celebrated an integration workshop in Sevilla at ELIMCO facilities. Both partners deployed and tested the next functionalities implemented within the REMODEL project: ✅ Dual-arm robot…
Warehouse and fingers updates and test of wires collection
The robotic station for the automated wire collection is in development Written by IEMA
ELVEZ Use Case Implementation Continues
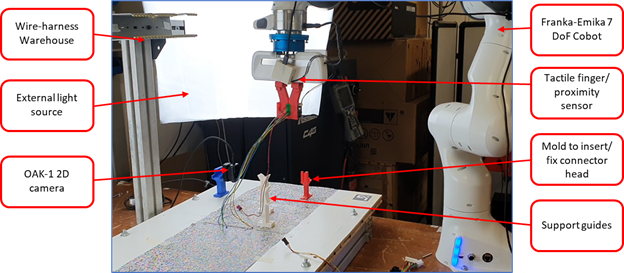
The implementation of ELVEZ use case is going on by testing the sensorized fingers developed at UCLV during the project with the final demo cables. Both tactile sensors and proximity…
RoboSECT wins third prize at StartCup Emilia Romagna!

RoboSECT, a UNIBO spin-off generated within the REMODEL project to exploit the research results related to Use Case 1, wins the third prize at the StartCup Emilia Romagna. RoboSECT is a robotic platform to automate the process…
Implementation of the medical hose surface preparation task
The medical hose surface preparation task for quality inspection has been successfully implemented and tested in the UNIBO laboratory and in the ENKI facility Written by ENKI
Robots have been installed at Volkswagen Poznan Plant
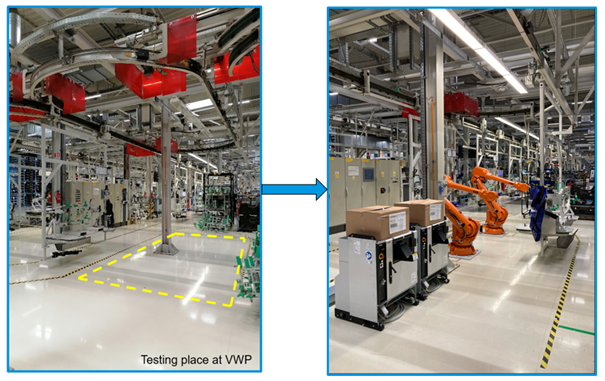
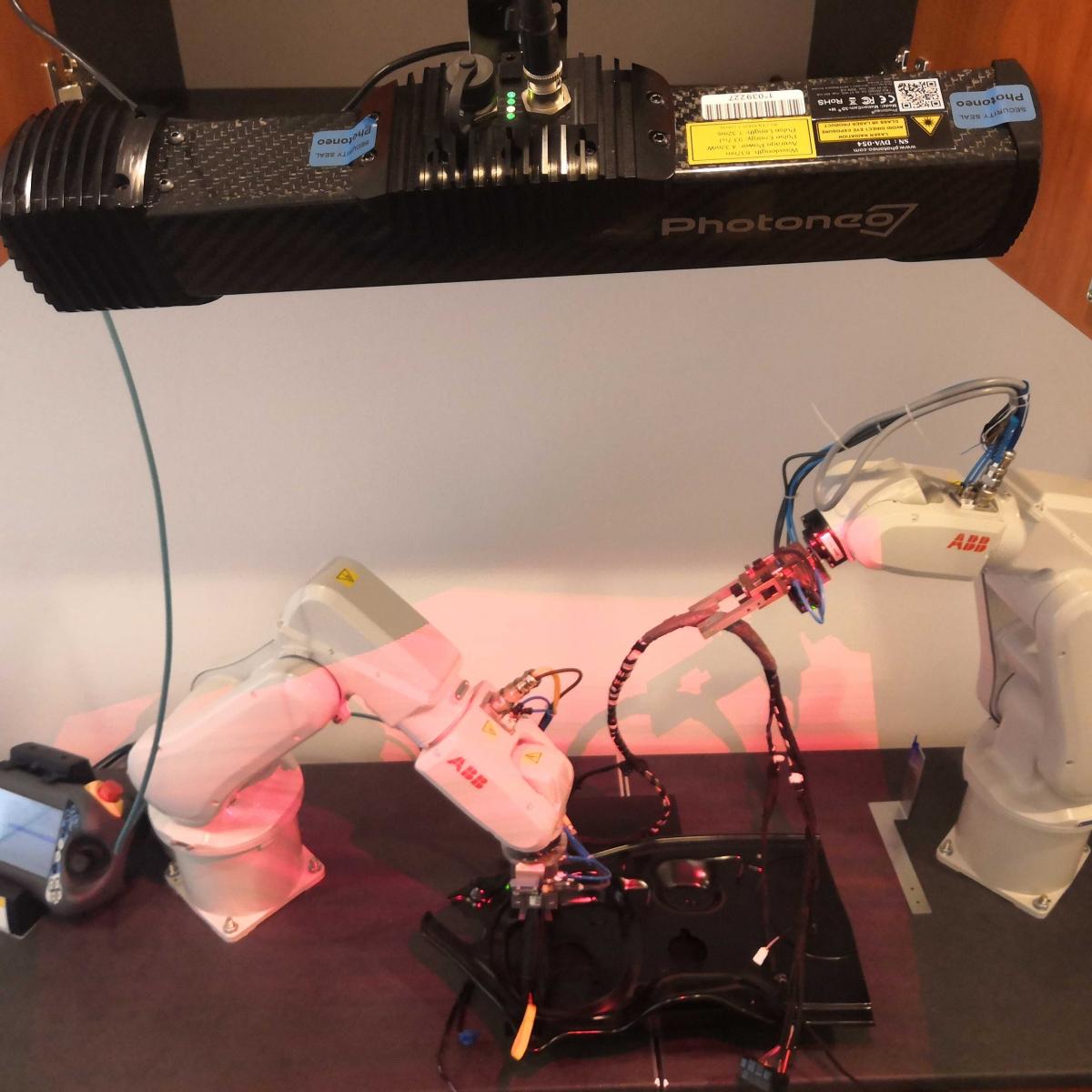
In the middle of September the installation of two ABB Robots was finalized. The main goal of such approach is to reflect as much as possible the real assembly conditions,…
Implementation of the ELVEZ use case
The REMODEL team is working on the implementation of the ELVEZ use case. The tasks was tested during the integration week carried out at UNIBO at the end of September…
A NEW DRIVER FOR 3D CAMERAS
A new ROS2 driver for 3D cameras has been developed at PUT and it is in the early stage of testing before public release. Pushing all the necessary dependencies to…
Behind the scenes: The REMODEL Calibration Pipeline
In our previous posts from June and December we have shone light on the optical detection of wires and wire harnesses. However, all these algorithms are based on camera images…
Wiring harness branches separation
One of the most challenging tasks to automatize in the ELVEZ pilot is the separation of the different cable branches of the wiring harnesses to route each of them through…
Latest updates from Elimco

ELIMCO’s setup has been installed and testing has already begun! Always keeping in mind the Project objectives and our ✈️use case✈️, the automation of the production of aeronautical cable harnesses,…
REMODEL’s 6th GA IN MUNICH

The last 12th and 13th of May, all the REMODEL partners participated in the 6th General Assembly of REMODEL. Finally, and after two and a half years, the meeting was…
CAD Programming
In the REMODEL project, we continue working on flexible programming. We are improving the application to create robot programs automatically. This application uses inputs such as the 2D/3D model and…
IEMA lastest updates
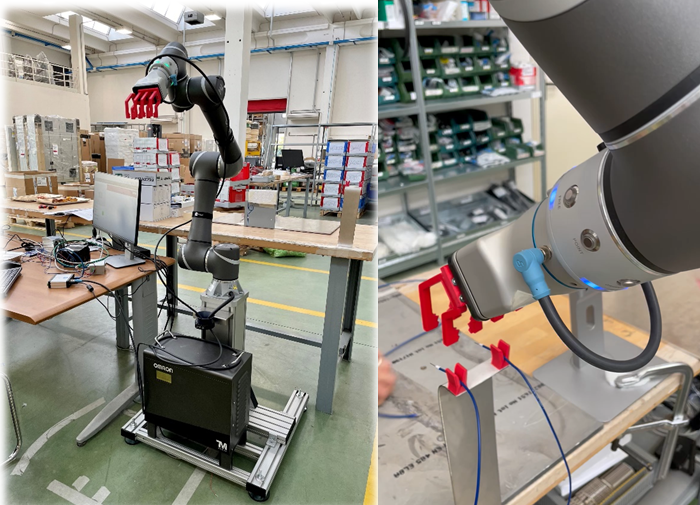
At IEMA we have been working on the integration of the robotic cell and on robotic fingers The robotic station to collect wires is under development and test on wires…
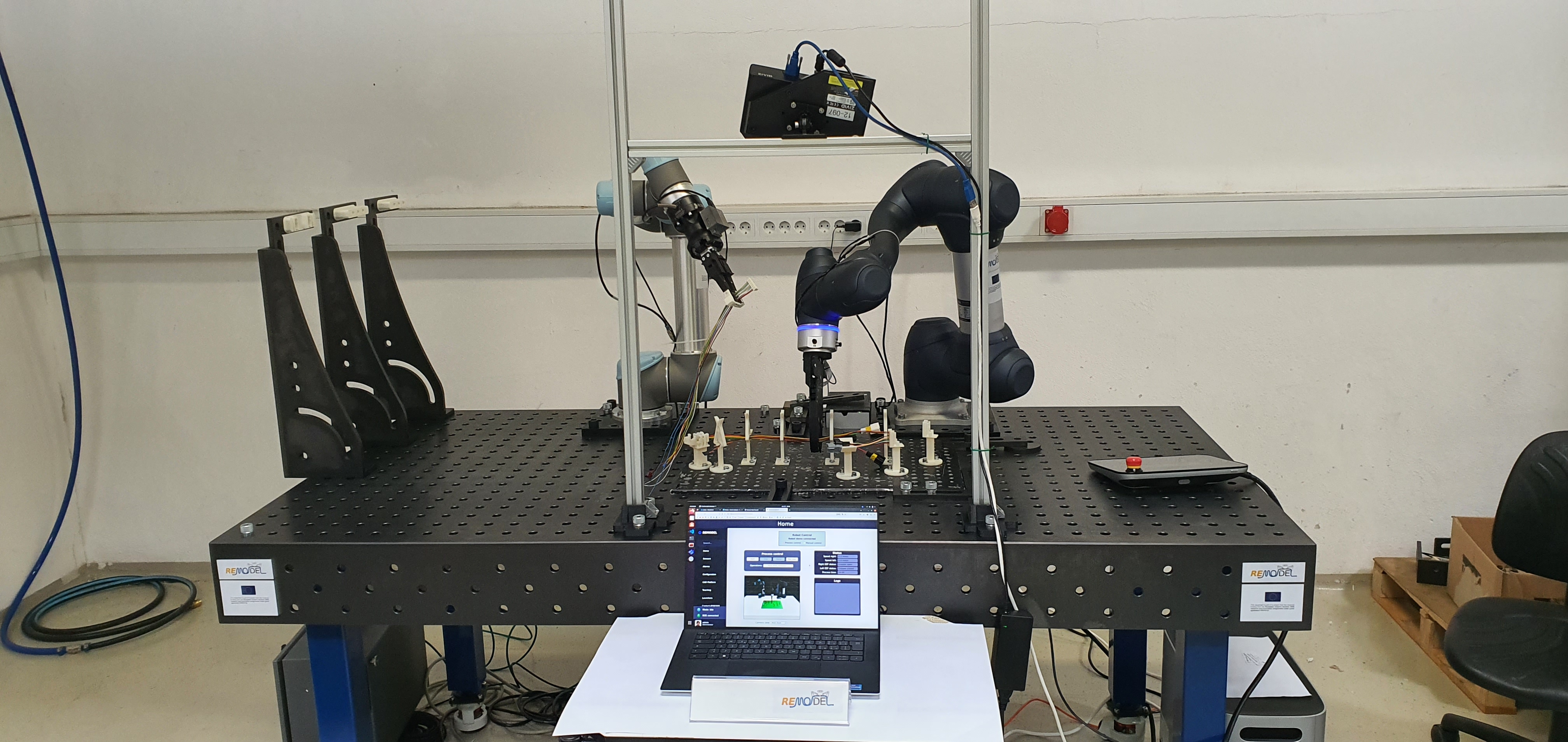
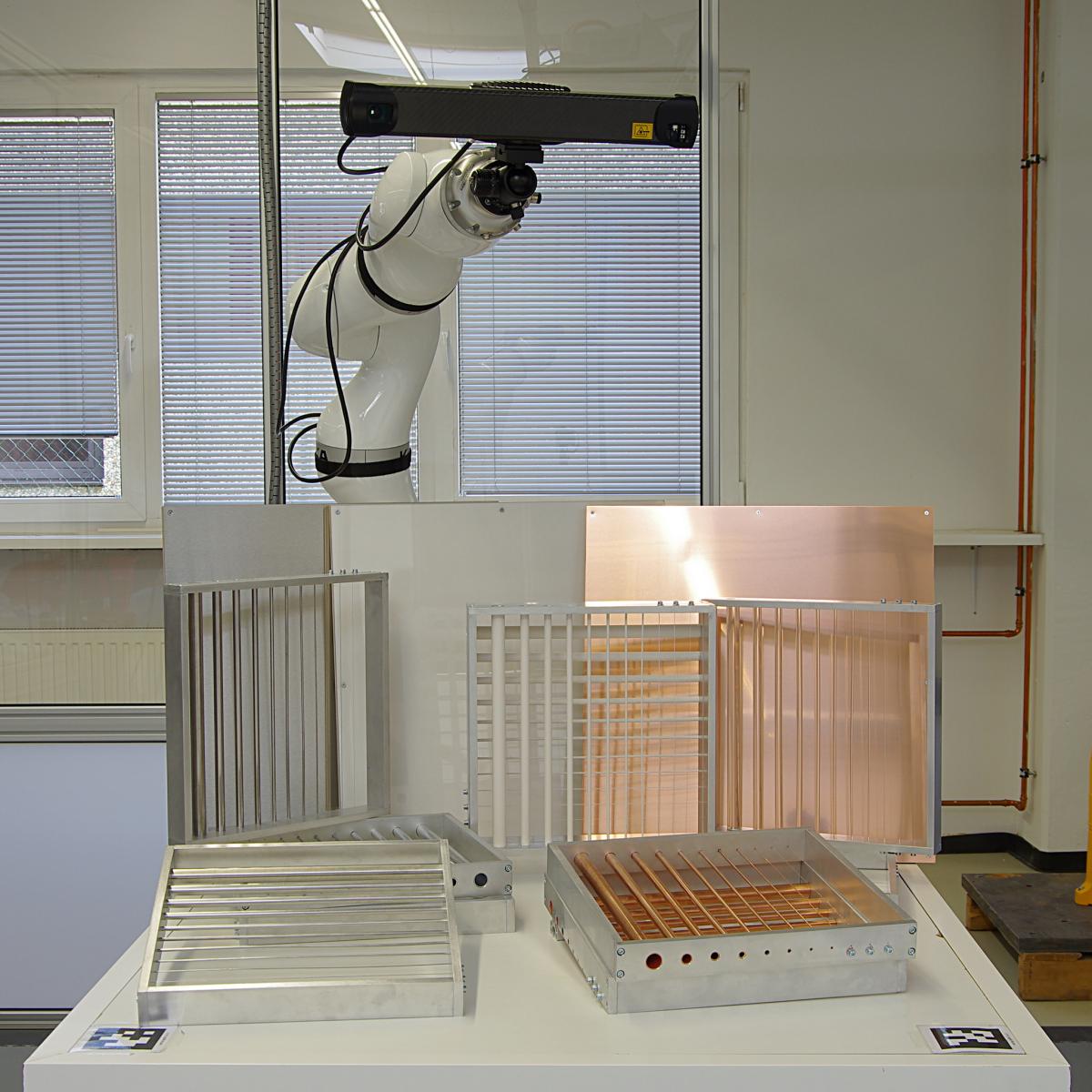
A Robotic Platform for Autonomous Switchgears Connection Testing
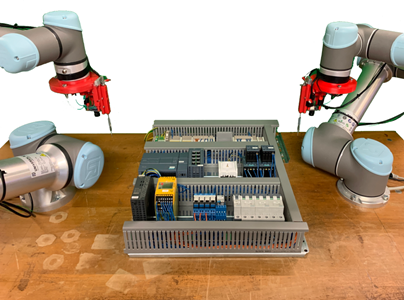
A dual-arm robotic platform for the autonomous testing of the electrical connections in a cabled switchgear has been developed and tested experimentally. A knowledge database for the execution of the…
REMODEL Participates to the Research Topic on “Deformable Object Manipulation”
The coordinator of the REMODEL project Prof. Gianluca Palli participates in the organization of a collection of articles on Frontiers in Neurorobotics about the research topic “Deformable Object Manipulation” Manipulation of…
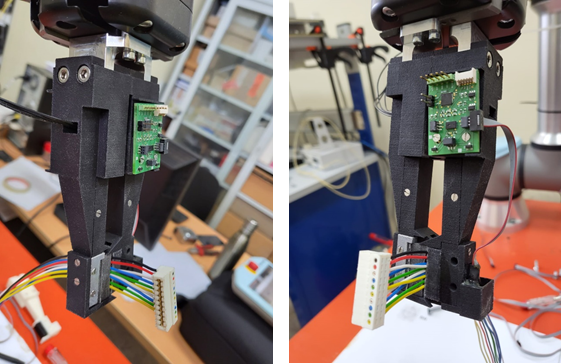
Proximity sensors have been integrated and tested
The proximity sensors, based on Time-of-Flight technology, have been integrated into REMODEL fingers and used to implement scanning strategies for thin wires. The video shows an application of the proximity…
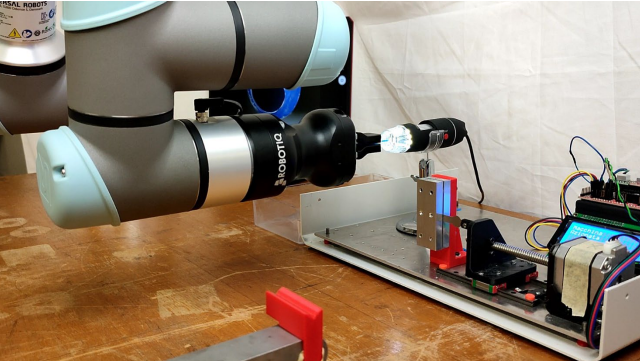
Medical Hose Detection and Tracking
The 3D shape reconstruction of a medical hose by means of multiple views gathered from a low cost 2D sensor has been developed and tested experimentally. In order to establish…
Third edition of the Special Session on “Cyber-Physical Systems for Deformable Object Manipulation” at ICPS2022

The REMODEL Consortium will organize a Special Session on “Cyber-Physical Systems for Deformable Object Manipulation” at the 5th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS) https://icps2022.com/ that will be held…
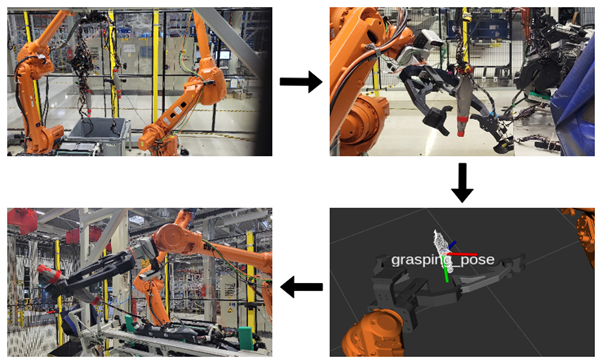
UC3 – Development of wiring harness assembly
Development of wiring harness assembly is pending in order to obtain the TRL5 in M32. Some of the project activities are completed, some are ahead of us. Within these firsts,…
ELVEZ lastest updates
The idea proposed by the REMODEL project is to create an incremental skill-based robot knowledge that, with few iterations of Teaching by Demonstration, allows the robot to operate with less…
Deformable Linear Object (DLO) tracking in wire manipulation task
The team at Poznan University of Technology (PUT) is developing a DLO tracking algorithm. Since image segmentation provides information about the occupied area, a stable and accurate mathematical expression is…
IEEE/RSJ International Workshop RoboTac 2021

On September 27, Salvatore Pirozzi (UCLV) will participate as keynote speaker at IEEE/RSJ International Workshop RoboTac 2021 (https://www.robotact.de/rbotac2021) “New Advances in Tactile Sensation, Interactive Perception, Control, and Learning: A Soft…
Results of sensor benchmark publicly available
In July 2020 we posted about the completion of our benchmark targets for the evaluation of 3D sensors. While we already summarized the results in our internal deliverable D4.1, which…
TAU lastest updates
Tampere University (TAU) has been working towards making physical tests with the dual armed Yaskawa robot, to work with the wire harness assembly use case belonging to ELVEZ. TAU has…
Robotic platform for aeronautical wiring harnesses manufacturing already in progress
ELIMCO is developing a robotic platform in collaboration with Tecnalia as a means to achieve a fluent manipulation of DLOs in the aeronautic industry. Existing manual or semi-automated manufacturing techniques…
The REMODEL’s youtube channel is ready!!!
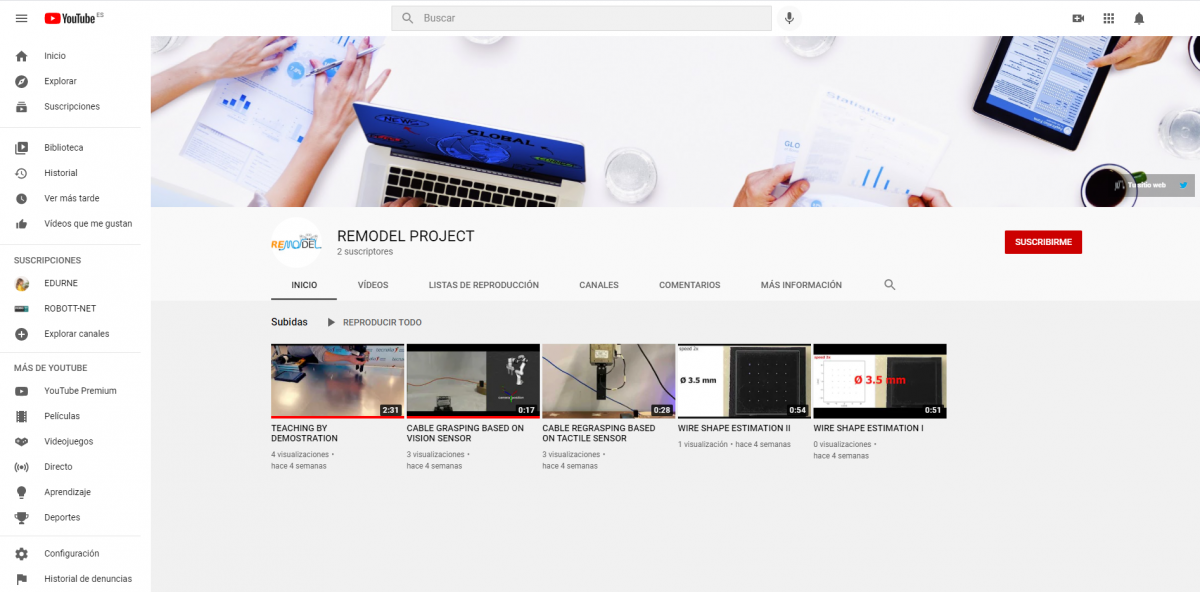
For greater dissemination of the project’s progress, in addition to pubilsh the videos on the web, they will also be published on the Youtube channel
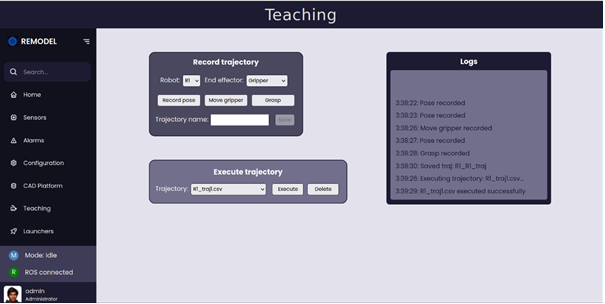
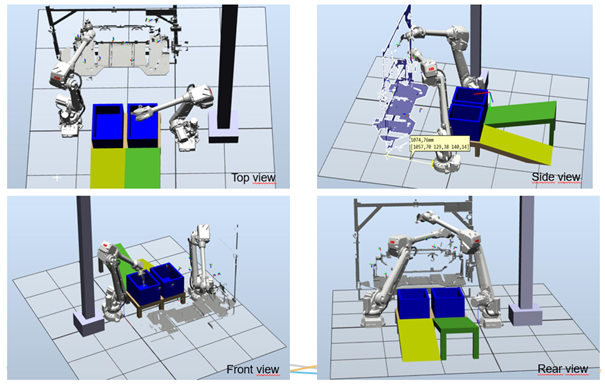
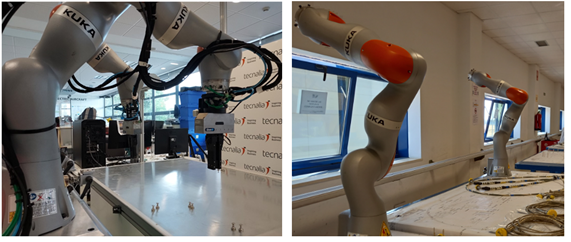
TECNALIA is working on teaching-by-demonstration framework
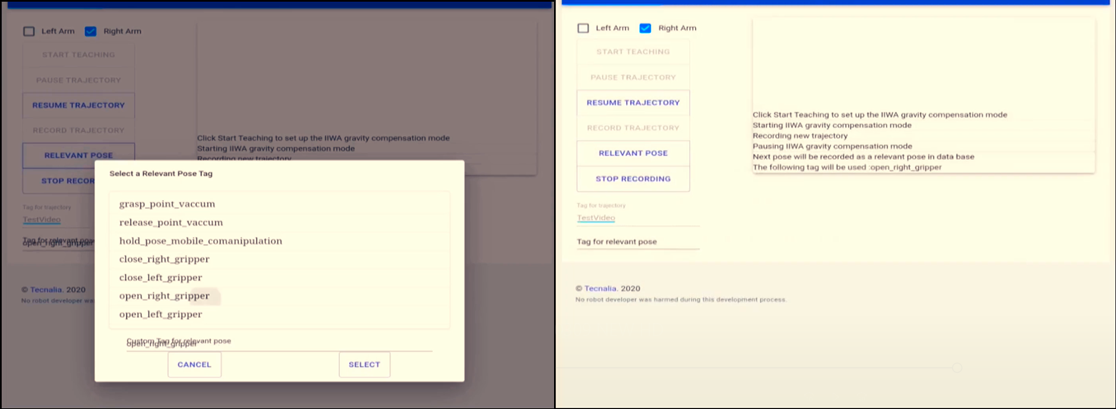
The teaching-by-demonstration framework has been set up. The framework allows to record, filter and reproduce the teached trajectories, introducing key poses to segment the task in different process steps (approach,…
IEMA is designing the robotic wire storage station interfacing with the REMODEL UC1
Using a cobot, the objective of the project is to collect cables crimped by Komax 630. Progect states: Design the fingers’ gripper to collect cables Design the cable clips to…
ERF 2021
Workshop on “Soft objects robotic manipulation for the future of European factories” We are very glad to announce the joint workshop that will be held at the 2021 European Robotics…
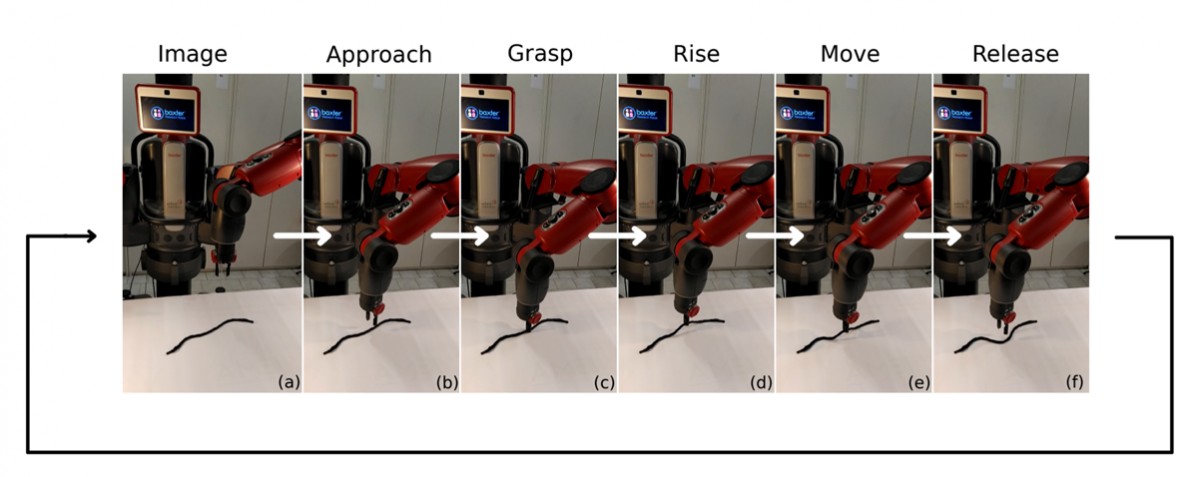
REMODEL sensorized fingers have started to work!
The fingers with integrated tactile sensors have started to be used for DLOs shape reconstruction. The sensorized finger is able, during a static grasp, to estimate the shape of cables…
SPECIAL ISSUE “State-of-Art in Sensors for Robotic Applications”
REMODEL partners, Salvatore Pirozzi and Gianluca Palli serve as Guest Editors for the Joint Special Issue “State-of-Art in Sensors for Robotic Applications”. The Special Issue is joint among the following…
2021 SPECIAL SESSION ON “CYBER-PHYSICAL SYSTEMS FOR DEFORMABLE OBJECT MANIPULATION”
Also in 2021, the REMODEL Consortium will organize a Special Session on “Cyber-Physical Systems for Deformable Object Manipulation” at the 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS) that will be held…
FINALLY, A REMODEL CHRISTMAS GIFT
In these hard times a glimmer of hope. At the end of this year strange and full of troubles a big present has arrived in ENKI. While all the REMODEL Partners…
PROJECT MEETING M12 – VIRTUAL MEETINGS DURING PANDEMIC TIMES OF CORONAVIRUS
Coronavirus Pandemic has a huge impact not only over the society, health care or economy, but also on the project activities. What actually should we do, when everyday life is…
IMPROVEMENT OF WORKCELL ERGONOMICS
Company ELVEZ d.o.o., is a manufacturer of specialized products for automotive industry, electrical and mechanical engineering, and white goods manufacturers. Robotic systems are still mainly used in high volume (low…
DEVELOPING PERCEPTION ALGORITHMS FOR WIRING HARNESSES MANIPULATION IN AUTOMOTIVE INDUSTRY
We are returning from holidays, but we did not spend our time without our robots and perception systems. Our team was working on the classification of the wiring harness classification….
Test Boards for Sensor Benchmarking are Ready!
After a careful design and crafting phase, the test boards for the planned 3D sensor benchmarking are finally ready. The test frames will allow a qualitative and cuantitative comparison of…
ICPS Organized by TAU- Special Session on DLOs manipulation
June witnessed the commencement of the conference on Industrial Cyber-Physical Systems, between the 10th and 12th of the month. Due to the ongoing COVID-19 pandemic the conference which was originally…
Aeronautical sector – ELIMCO use case

To speak about the aeronautical sector is to speak about wealth and sovereignty. It is a strategic sector that clearly differentiates the countries that in their GDP bet on high…
REMODEL use cases
To demonstrate the effectiveness of the technologies developed in REMODEL, a comprehensive set of industrial manufacturing use cases involving DLOs manipulation is being implemented and studied. Use case 1: Switchgear wiring…
3D MODEL FOR IEMA USE CASE IS READY!!
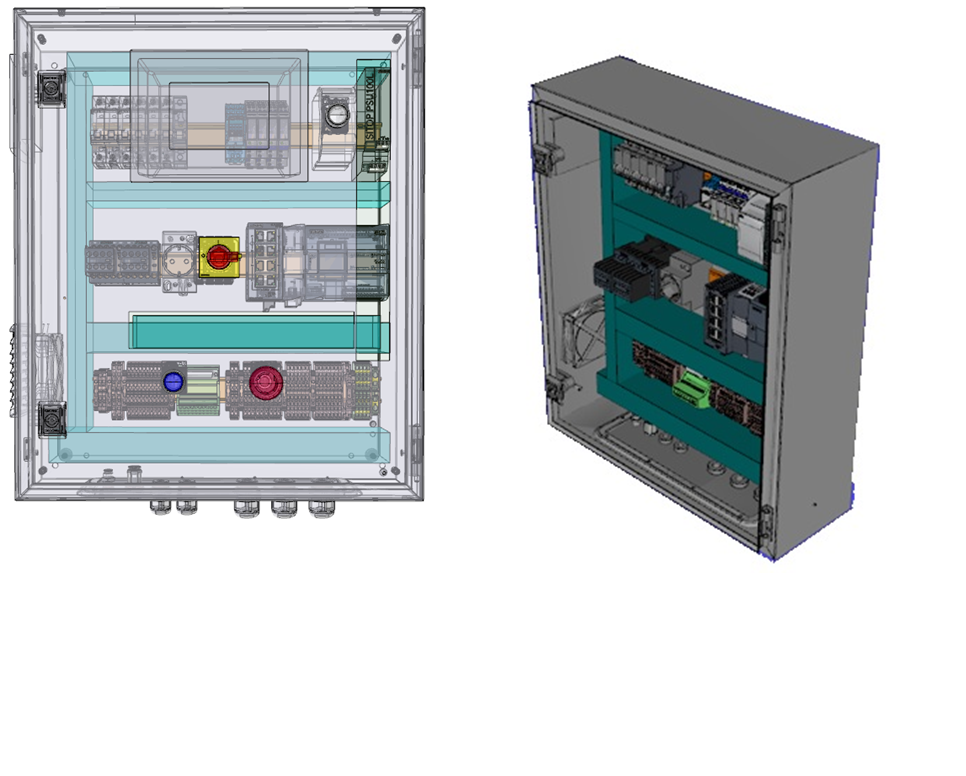
The 3D model for IEMA use case is ready for production!!! During next month the cabinet will be produced and new data will be added to database of components. In…
THE PCB OF TACTILE SENSORS FOR REMODEL ARE READY!!!
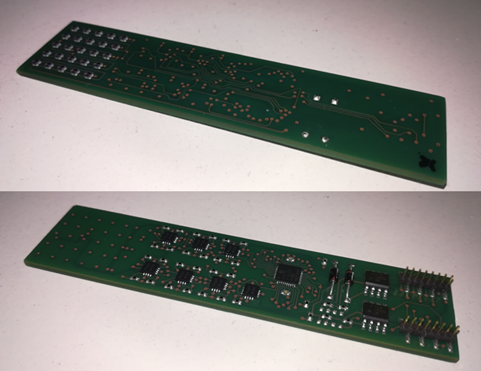
The realization of sensorized fingers for REMODEL use cases go on… The Printed Circuit Boards of tactile sensors are ready and UCLV are working on mechanical design of fingers in…
SPECIAL SESSION ON “CYBER-PHYSICAL SYSTEMS FOR DEFORMABLE OBJECT MANIPULATION”

The REMODEL Consortium will organize a Special Session on “Cyber-Physical Systems for Deformable Object Manipulation” at the 3rd IEEE International Conference on Industrial Cyber-Physical Systems (ICPS) that will be held in Tampere, Finland,on…
KICK-OFF MEETING IN BOLOGNA (UNIVERSITY OF BOLOGNA)

REMODEL kick-off meeting was organized by UNIBO in Bologna, from the 19th to 20th of November 2019. The official launching of the Project was a good opportunity to unify the…