
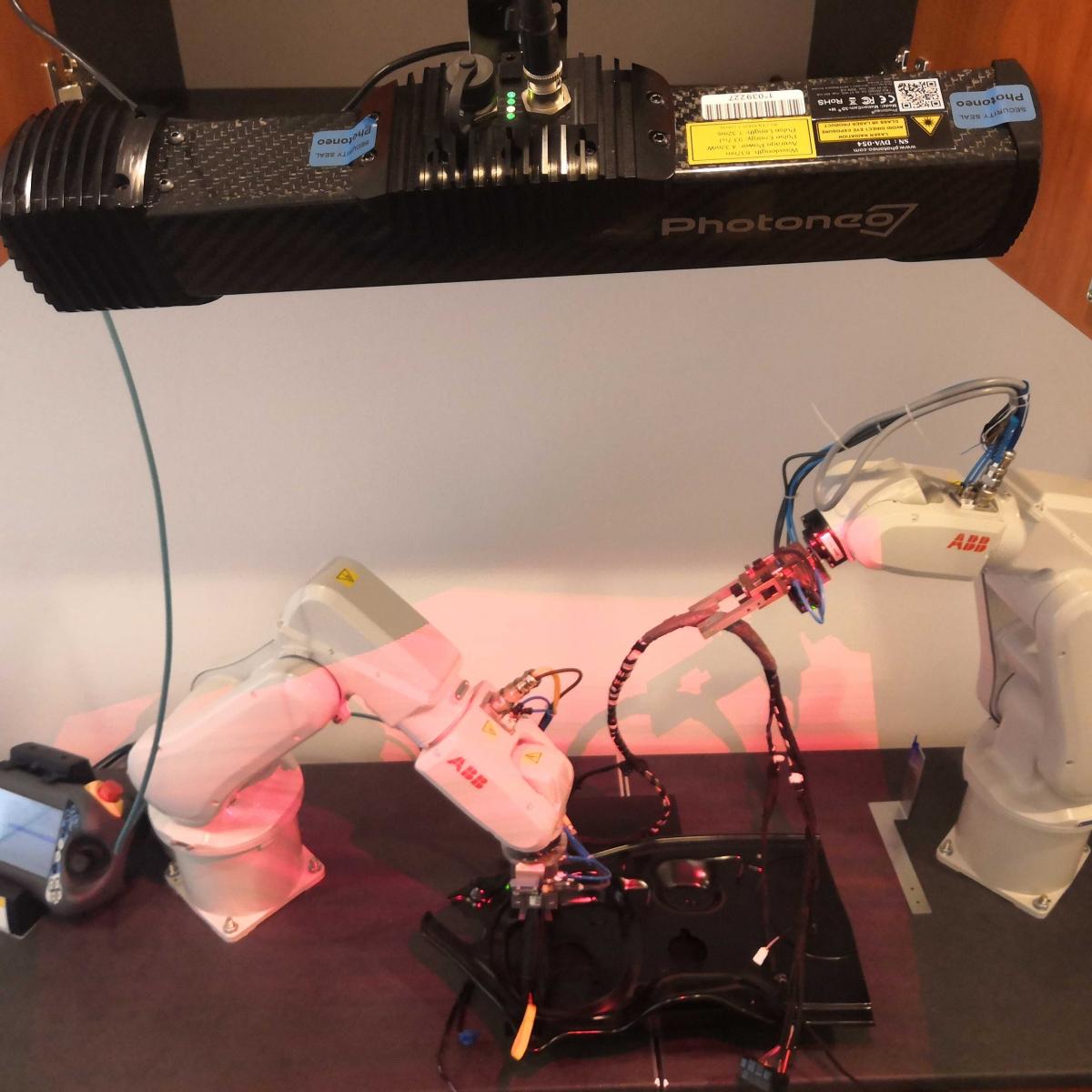
A new ROS2 driver for 3D cameras has been developed at PUT and it is in the early stage of testing before public release.
Pushing all the necessary dependencies to the modern framework takes advantage of state-of-the-art approaches within the software communication layer. It allows to set up of a robotic environment with real-time execution and possible lifecycle components handling. These capabilities are necessary regarding the industrial nature of the use cases, which mainly take place in relation to wiring harness manipulation.
Perception and manipulation pipelines stay the backbone of REMODEL’s use cases. Thus robust communication among both parts of the stack will keep the reliability and repeatability of tasks performed. So with that in mind, apart from 3D camera software development, a recently released robot driver, which is during the integration phase into a common environment to allow testing AI algorithms before moving all the effort to the target factory.
Written by PUT