
In the REMODEL project, we continue working on flexible programming. We are improving the application to create robot programs automatically.
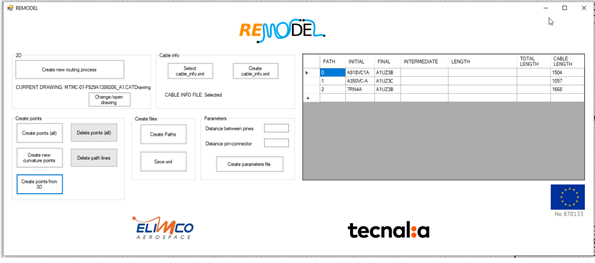
This application uses inputs such as the 2D/3D model and the Excel documentation of the wire harnesses to obtain the strategic positions of the different points to create the wiring paths. The users only have to select the intermediate points.
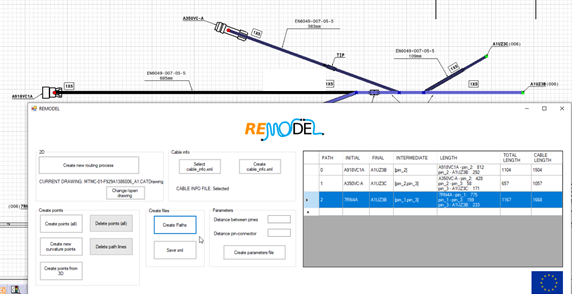
The different files created in the application are sent to the robotic system afterward. The robot reads the files and executes the implemented routines; the robot initially inserts the pins on the wiring table and then routes the wires on the correct path.
Written by TECNALIA