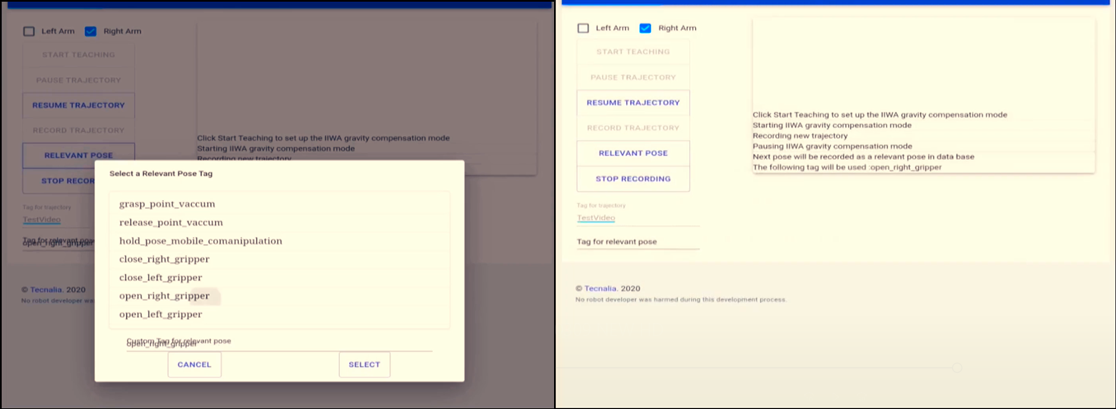
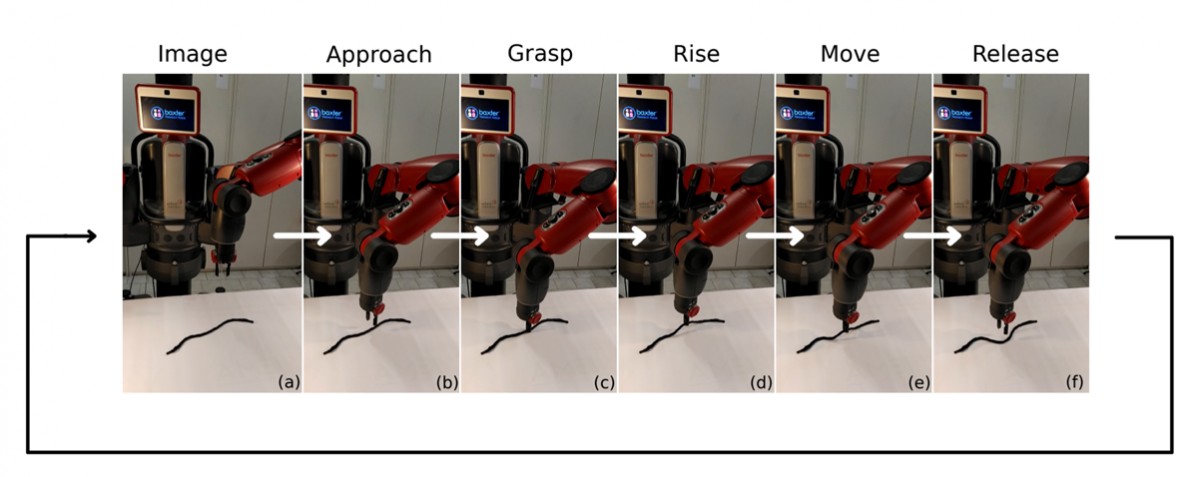
The teaching-by-demonstration framework has been set up. The framework allows to record, filter and reproduce the teached trajectories, introducing key poses to segment the task in different process steps (approach, cable grasping, routing…). The framework is being...
Using a cobot, the objective of the project is to collect cables crimped by Komax 630. Progect states: Design the fingers’ gripper to collect cables Design the cable clips to hold the cables inside a warehouse A ROS simulation was used to evaluate the feasibility of...
Workshop on “Soft objects robotic manipulation for the future of European factories” We are very glad to announce the joint workshop that will be held at the 2021 European Robotics Forum (https://erf2021.eu/) organized by four EU projects REMODEL...
The fingers with integrated tactile sensors have started to be used for DLOs shape reconstruction. The sensorized finger is able, during a static grasp, to estimate the shape of cables with different diameters and in different configurations. Sensorized grippers are...
REMODEL partners, Salvatore Pirozzi and Gianluca Palli serve as Guest Editors for the Joint Special Issue “State-of-Art in Sensors for Robotic Applications”. The Special Issue is joint among the following two journals: Machines (ISSN 2075-1702, Indexed in...
Also in 2021, the REMODEL Consortium will organize a Special Session on “Cyber-Physical Systems for Deformable Object Manipulation” at the 4th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS) that will be held in Victoria, Canada, on May...