
The team at Poznan University of Technology (PUT) is developing a DLO tracking algorithm.
Since image segmentation provides information about the occupied area, a stable and accurate mathematical expression is necessary for the wire manipulation task.

Illustration 1: Depth image input
After processing camera sensor input, using splines, we can obtain the mathematical representation of a continuous linear object reflecting the shape of the wire.
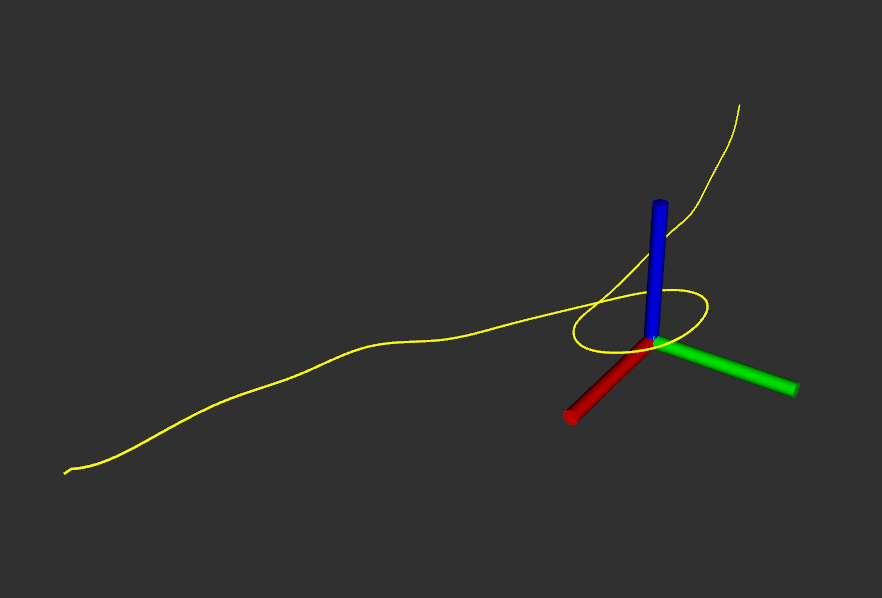
Illustration 2: 3D spline representation of the wire
The developed method is suitable for cable tracking using RGB image input and a depth camera to determine a 3D shape. Our implementation allows for fast-tracking of the wire, which is vital in a task requiring low latency in quick wire movements scenarios.
Further research will provide an estimation of the kinematic robot state required to achieve desired wire shape.
Written by PUT