
We are returning from holidays, but we did not spend our time without our robots and perception systems. Our team was working on the classification of the wiring harness classification. For that purpose, we were using RGB and depth data.
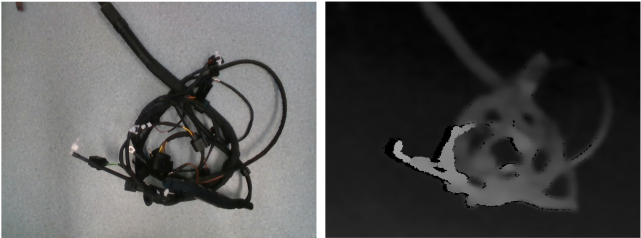
Illustration 1: RGB and depth images of the wiring harness branch.
The problem of classifying branches is not trivial as the wiring harnesses are not rigid. Hence we need to recognized branches of the harness regardless of their configuration. Having said that we need our system to find key features under different transformation caused by the bending of the cables.
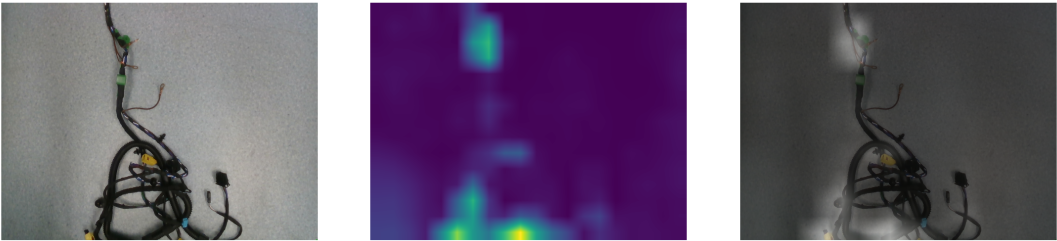
Illustration 2: Saliency map for the wiring harness classification task
We have achieved a high percentage of correctly classified branches, but we wanted to dive deeper into the understanding of the learning process. We checked which features learned by the system are used for classification, which resulted in the saliency map. This information is crucial as we are working in cooperation with the industry, which requires the system to point the evidence which led to its decisions.
Written by PUT