
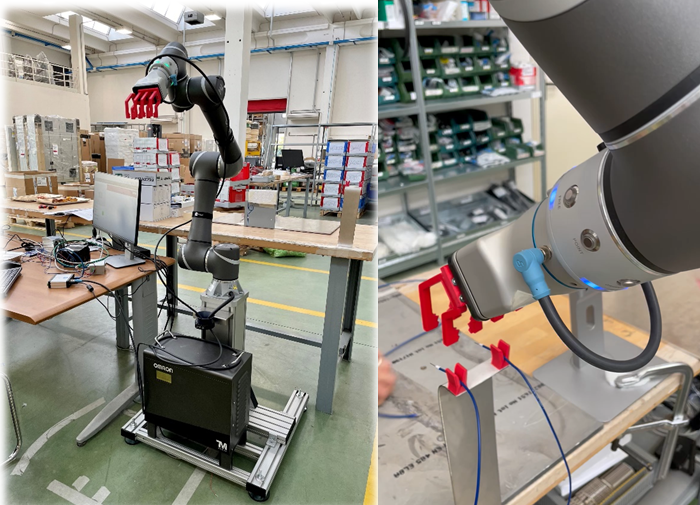
At IEMA we have been working on the integration of the robotic cell and on robotic fingers
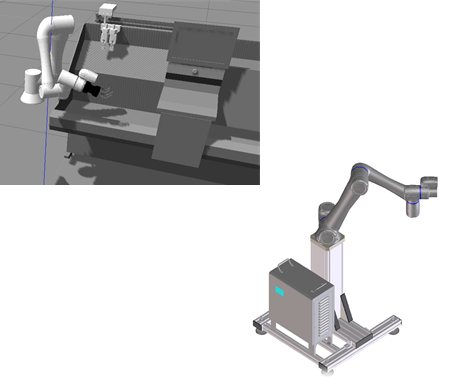
The robotic station to collect wires is under development and test on wires grasping and introduction started using a collaborative Omron TM5
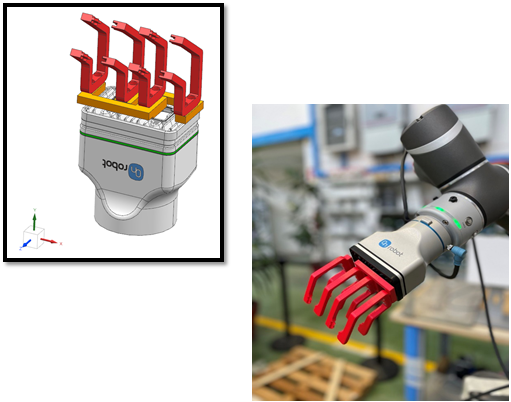
We designed the robotic grip fingers, adapting them to mount them on the Onrobot gripper and we have started with the first grip and placement test.
The following video shows the test performed:
Written by IEMA