
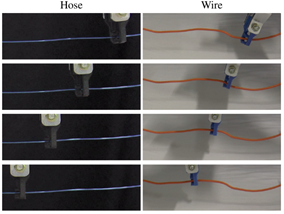
The 3D shape reconstruction of a medical hose by means of multiple views gathered from a low cost 2D sensor has been developed and tested experimentally.
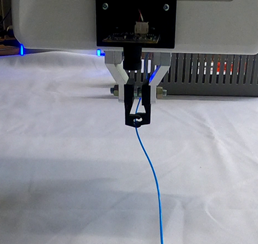
In order to establish the capability of the robot of tracking the hose shape, a test is performed using purposely designed gripper fingers that, once closed, provide a hollow circle with diameter of 6 mm. First, the hose shape is estimated, then the center of the circumference is used as reference frame for the generation of the motion and the robot successfully follow the hose shape without touching it.
The material of the adopted hose is semi-transparent, such that it is almost invisible to commercial 3D sensors (including high-end ones) and laser scanners. Despite the complexity of the task, the cheap 2D camera used in this work is able to provide reliable reconstruction of the sample objects allowing for a correct tracking without touching in both experiments.
This result enables to grasp the medical hose for the subsequent quality analysis phase.
Written by ENKI