
One of the most challenging tasks to automatize in the ELVEZ pilot is the separation of the different cable branches of the wiring harnesses to route each of them through the required path of guides.
The use case 2 of REMODEL consists of the automation of the wiring harness manufacturing process. Two different pilots are used to investigate this use case in two different domains, the aerospace and the automotive industry. The wiring harnesses and the manufacturing process of these two pilots have certain differences, which create different challenges. In particular, the cables composing the wiring harnesses used by ELVEZ (automotive industry), and the distances between them, are much smaller than the ones used by ELIMCO (aerospace industry). Due to this, one of the most challenging tasks to automatize in the ELVEZ pilot is the separation of the different cable branches of the wiring harnesses to route each of them through the required path of guides.
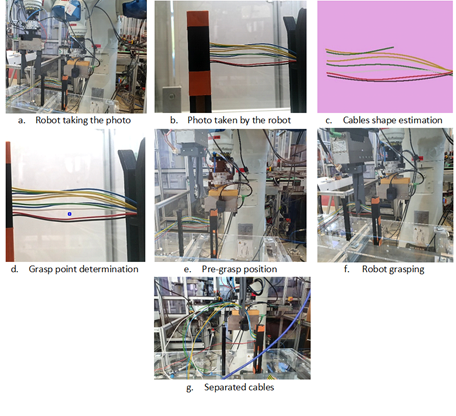
Tampere University (TAU) has been working towards this task and has already obtained successful results for separation of the ELVEZ wiring harness branches using a dual-arm robot. The proposed solution exploits perception, using an eye-in-hand camera, to determine the optimal grasping point to separate the required group of cables. The developed module interacts with many other modules of the REMODEL system, such as the CAD Platform, the dual-arm trajectory generator, and a machine vision module to estimate the shape of the cables. The following images show, step by step, a successful wiring harness separation using this module. In this case the robot is separating the red and black cables from the rest of cables of the wiring harness.
Additionally, TAU was awarded with the best presentation prize at the IEEE ICPS 2022 Conference organized by WMG, University of Warwick for the paper entitled “An approach for the bimanual manipulation of a deformable linear object using a dual-arm industrial robot: cable routing use case”. This article presents a solution for another challenge of the ELVEZ use case, the dual-arm cable routing.

These two tasks, the wiring harness branches separation and the cables routing, will be integrated in the following months, resulting in the robotized full wiring harness routing.
Written by TAU