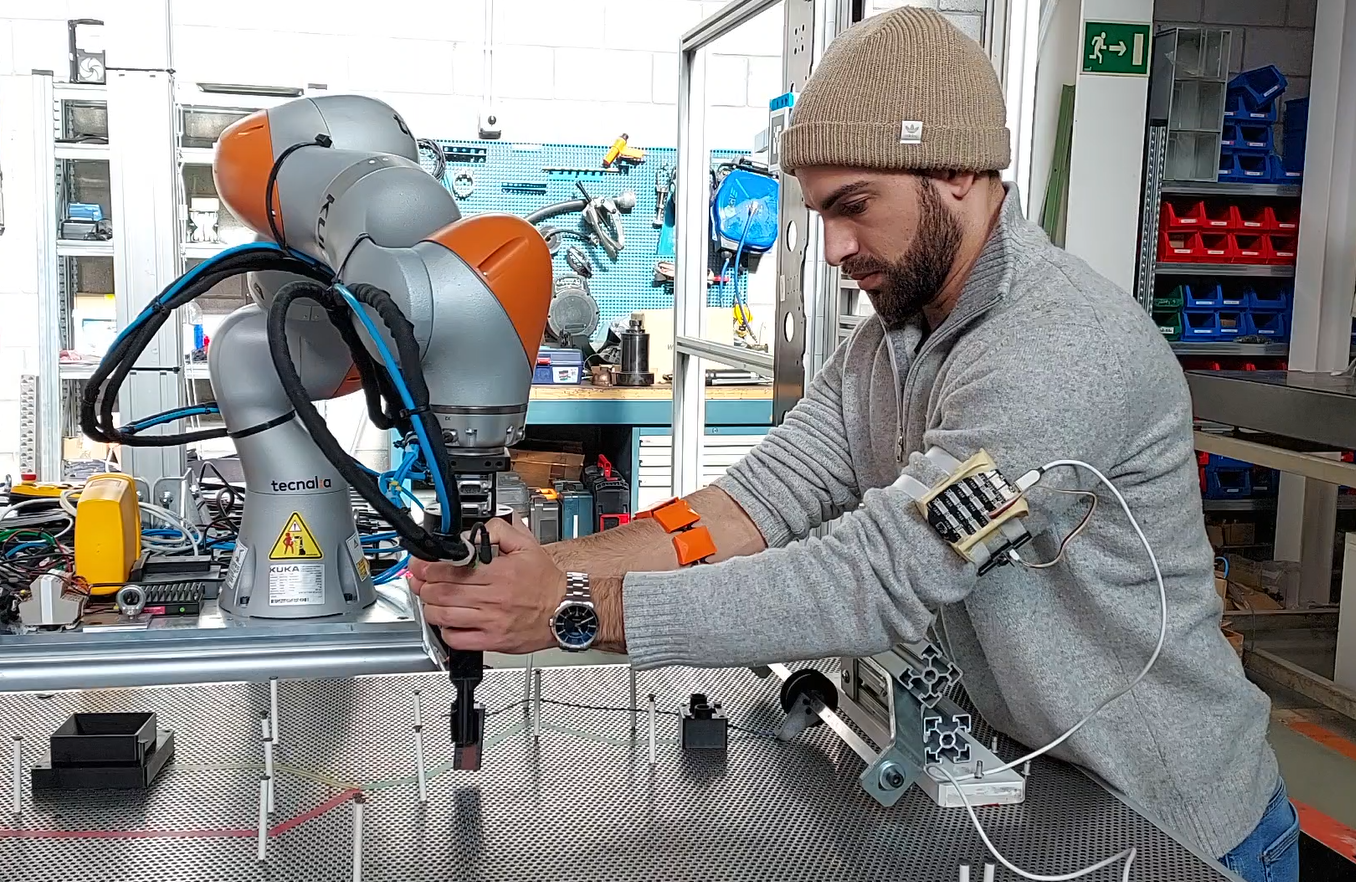
UNIBO and TECNALIA successfully performed joint experiments testing a novel framework of kinesthetic teaching enhanced with biological signals measured from the operators (electromyographic signals, sEMG) for improving intuitive teaching of robot trajectories for wiring task, along with the programming of the gripper grasping and robot’s impedance level. A group of 10 subjects was engaged in the study, demonstrating the feasibility of the approach and paving the way for a new generation of advanced human-robot interfaces for intuitive programming by demonstration of collaborative manipulators!