The coordinator of the REMODEL project Prof. Gianluca Palli participates in the organization of a collection of articles on Frontiers in Neurorobotics about the research topic “Deformable Object Manipulation” Manipulation of deformable objects is crucial...
The proximity sensors, based on Time-of-Flight technology, have been integrated into REMODEL fingers and used to implement scanning strategies for thin wires. https://remodel-project.eu/wp-content/uploads/2023/05/Scan-Wire-Demo_0.mp4 The video shows an application of...
The 3D shape reconstruction of a medical hose by means of multiple views gathered from a low cost 2D sensor has been developed and tested experimentally. In order to establish the capability of the robot of tracking the hose shape, a test is performed using purposely...
The REMODEL Consortium will organize a Special Session on “Cyber-Physical Systems for Deformable Object Manipulation” at the 5th IEEE International Conference on Industrial Cyber-Physical Systems (ICPS) https://icps2022.com/ that will be held at the University of...
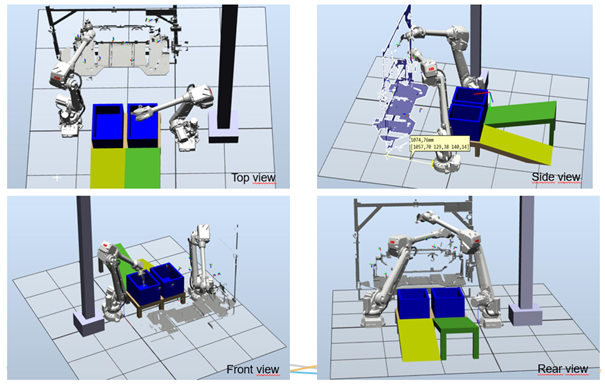
Development of wiring harness assembly is pending in order to obtain the TRL5 in M32. Some of the project activities are completed, some are ahead of us. Within these firsts, there is the simulation of the process and a preparation of test station at Volkswagen Plant....