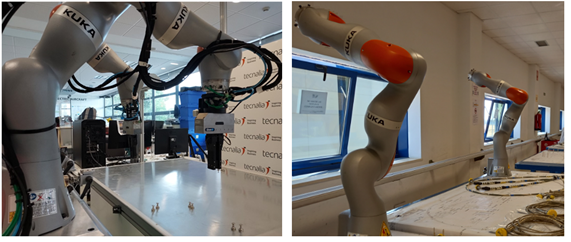
ELIMCO is developing a robotic platform in collaboration with Tecnalia as a means to achieve a fluent manipulation of DLOs in the aeronautic industry. Existing manual or semi-automated manufacturing techniques for wiring harnesses are characterized by operations that...
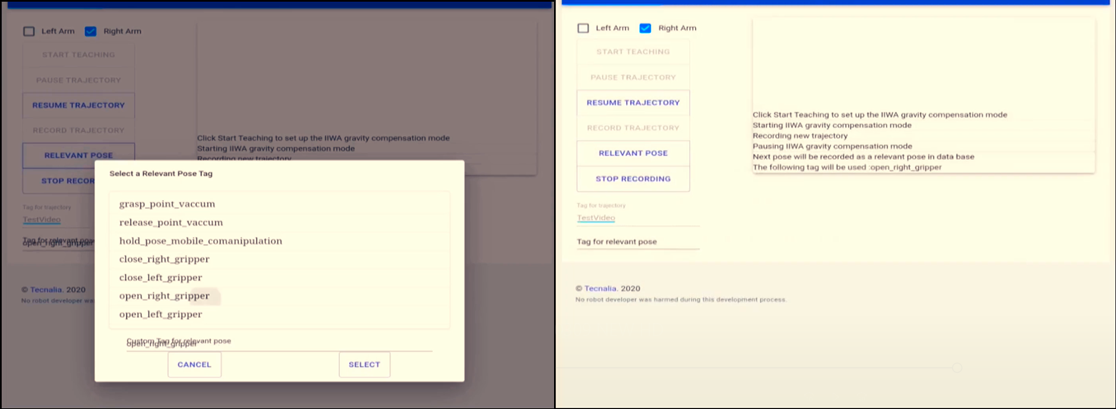
The teaching-by-demonstration framework has been set up. The framework allows to record, filter and reproduce the teached trajectories, introducing key poses to segment the task in different process steps (approach, cable grasping, routing…). The framework is being...
Using a cobot, the objective of the project is to collect cables crimped by Komax 630. Progect states: Design the fingers’ gripper to collect cables Design the cable clips to hold the cables inside a warehouse A ROS simulation was used to evaluate the feasibility of...
Workshop on “Soft objects robotic manipulation for the future of European factories” We are very glad to announce the joint workshop that will be held at the 2021 European Robotics Forum (https://erf2021.eu/) organized by four EU projects REMODEL...