RoboSECT, a UNIBO spin-off generated within the REMODEL project to exploit the research results related to Use Case 1, wins the third prize at the StartCup Emilia Romagna. RoboSECT is a robotic platform to automate the process of manufacturing and quality...
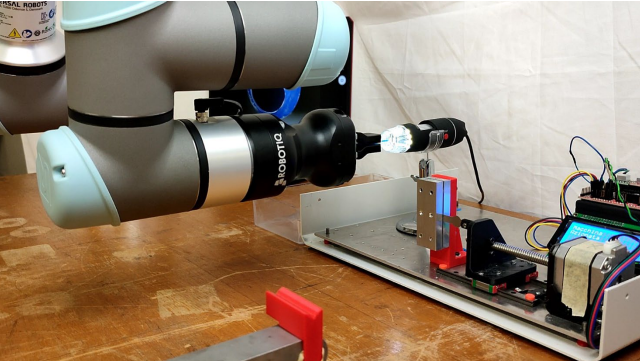
The medical hose surface preparation task for quality inspection has been successfully implemented and tested in the UNIBO laboratory and in the ENKI facility Written by ENKI
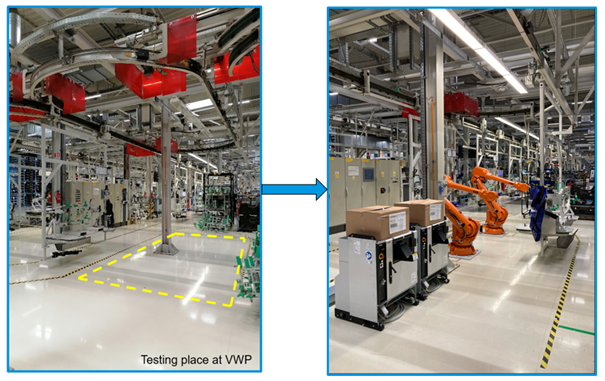
In the middle of September the installation of two ABB Robots was finalized. The main goal of such approach is to reflect as much as possible the real assembly conditions, but by using robots instead of human work. Test station is located next to the main assembly...
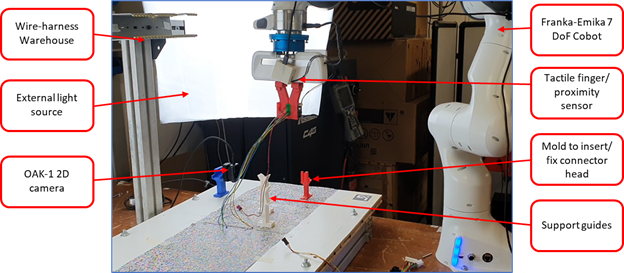
The REMODEL team is working on the implementation of the ELVEZ use case. The tasks was tested during the integration week carried out at UNIBO at the end of September 2022. The cable sets are grasped from the warehouse, then the connectors are inserted into proper...
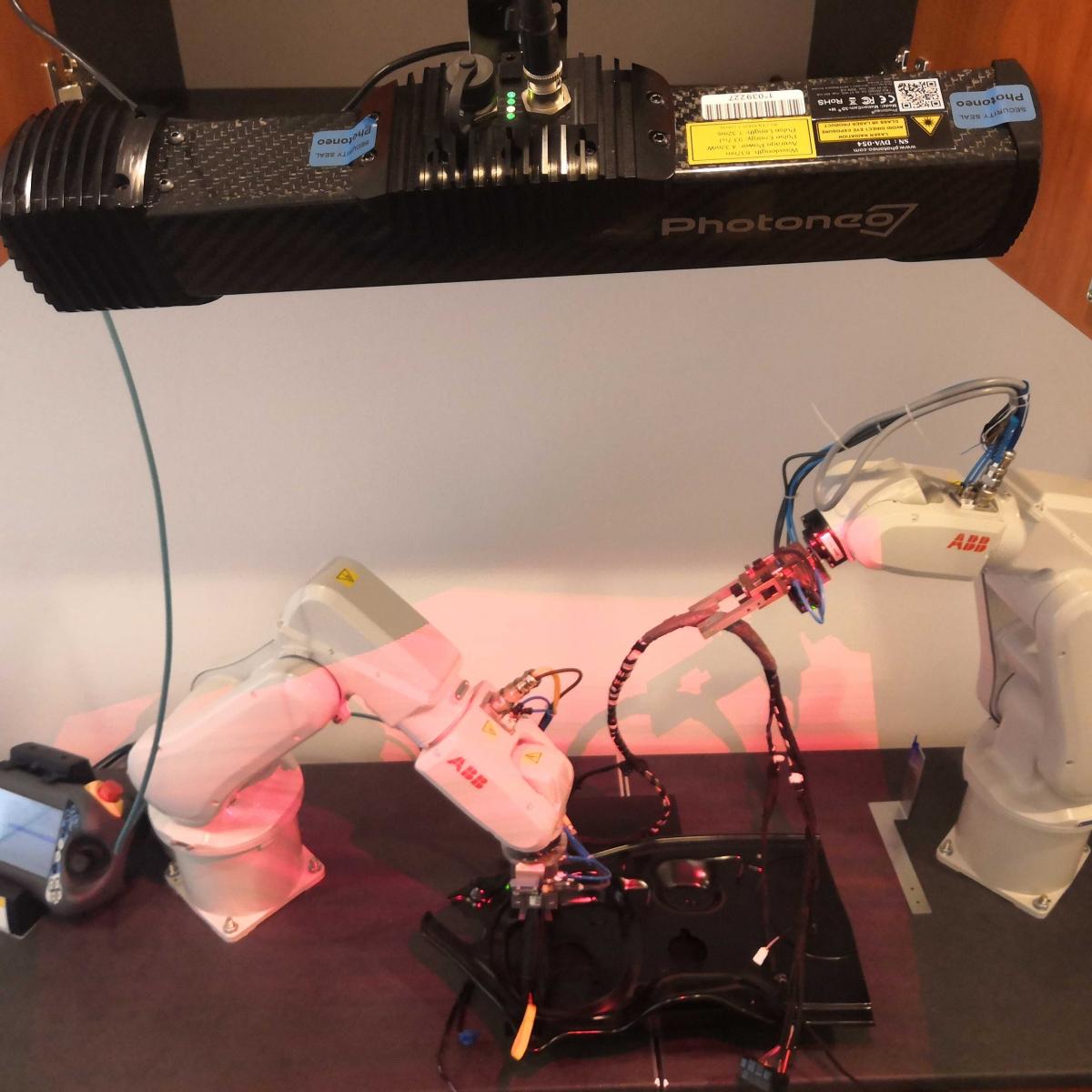
A new ROS2 driver for 3D cameras has been developed at PUT and it is in the early stage of testing before public release. Pushing all the necessary dependencies to the modern framework takes advantage of state-of-the-art approaches within the software communication...
In our previous posts from June and December we have shone light on the optical detection of wires and wire harnesses. However, all these algorithms are based on camera images and return the poses of desired objects in the sensor’s coordinate frame. To incorporate...